¶ Overview
This only applies to Firmware versions above 3.9.9
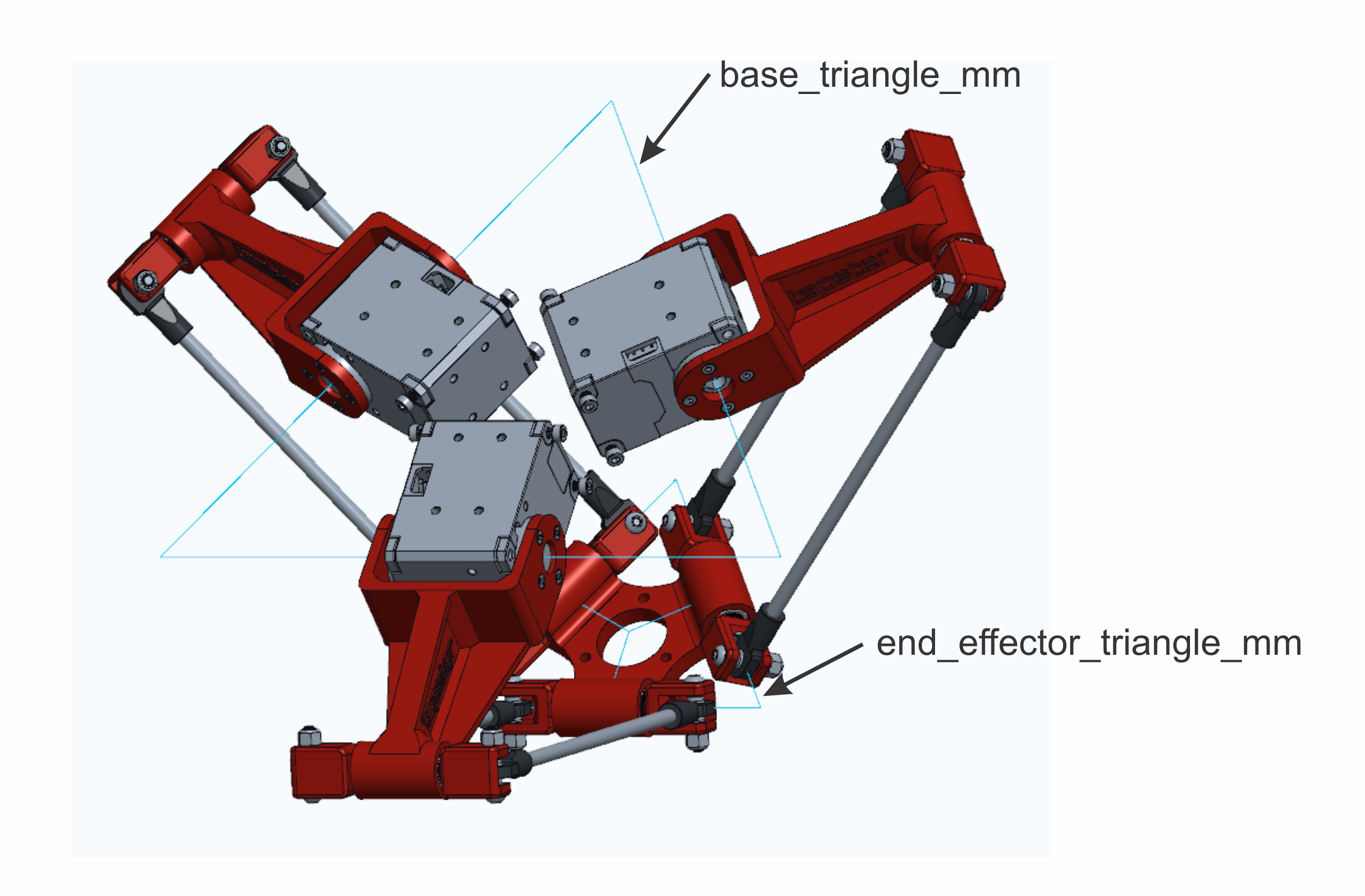
There are sereval types of Delta Robots. This kinematic covers the type with the rotating actuator arms. All three actuator assemblies must be exactly the same. See the images below.
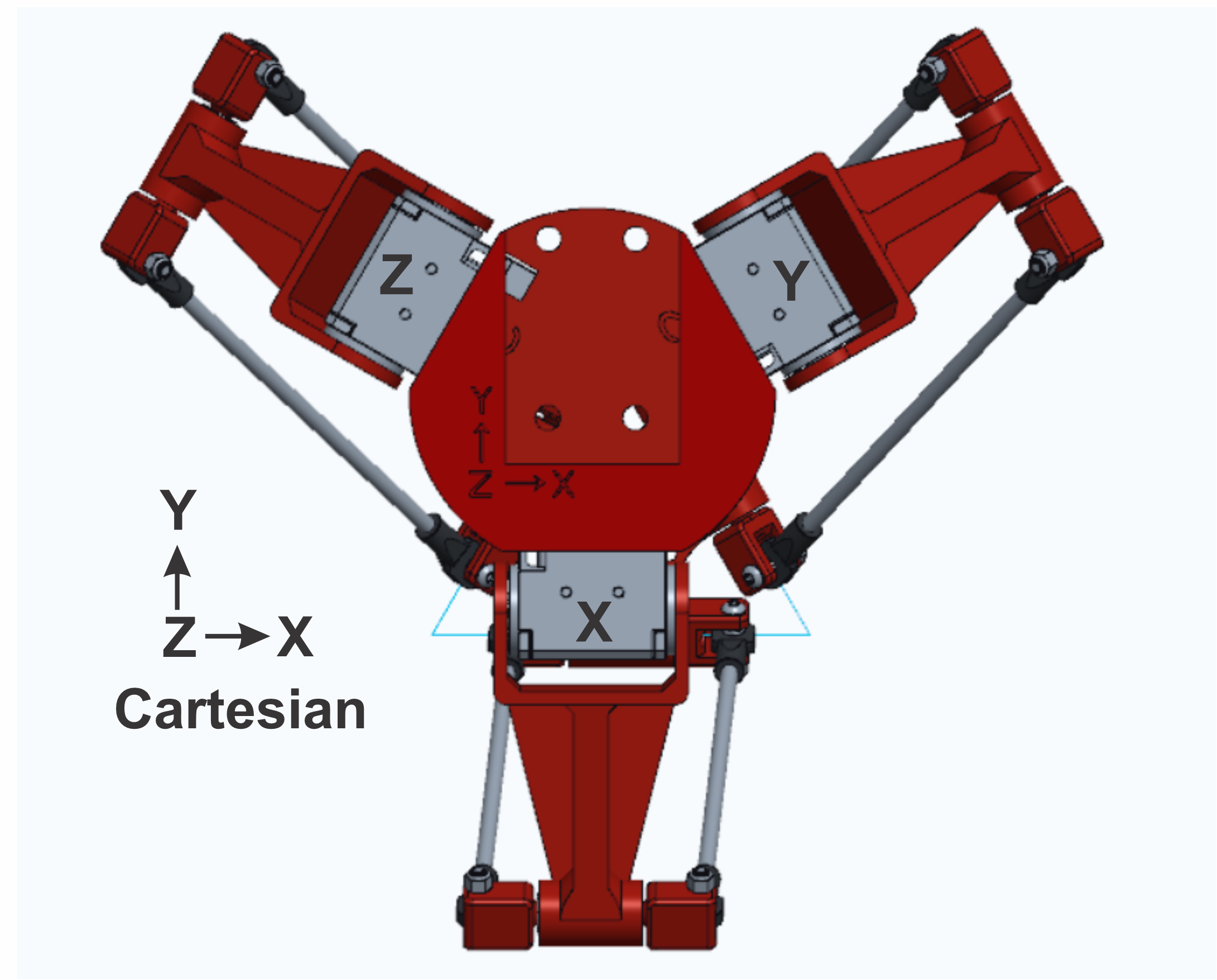
Gcode works in cartesian space (XYZ). A simple gcode move in X will need all 3 motors to move. The kinematic system will convert the cartesian location to degrees on the motors. Therefore, there will be a few places in the config where you would normally use millimeters, but degrees should be used. Read the details on each setting to see what to use.
Degrees increase in a clockwise roation. The 0 angle is when the arm is completely horizontal. Positions above horizontal are negative and positions below the horizontal are positive.
This is currently designed for use with stepper motors. The documentation will be updated when other motor types are tested.
¶ Config
¶ Kinematics Section
kinematics:
parallel_delta:
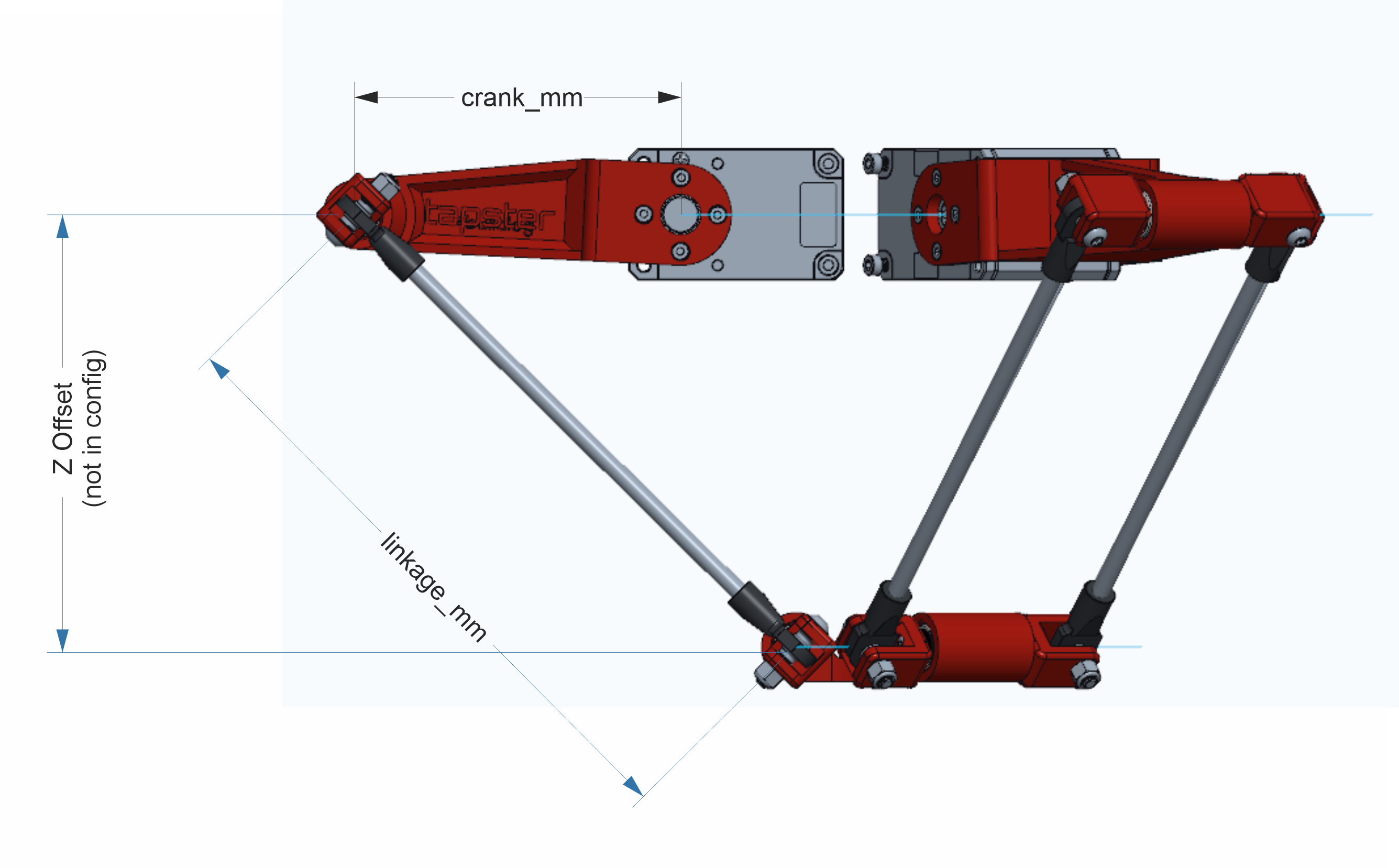
crank_mm: 70.00
base_triangle_mm: 180.00
linkage_mm: 133.500000
end_effector_triangle_mm: 86.60
kinematic_segment_len_mm: 1.00
use_servos: false
up_degrees: -29.000000
- crank_mm: See image
- Type: Float
- Range: 20 to 500 millimeters
- Default: 70.0
- base_triangle_mm: See image
- Type: Float
- Range: 20 to 500 millimeters
- Default: 179.437
- linkage_mm: See image
- Type: Float
- Range: 20 to 500 millimeters
- Default: 133.50
- end_effector_triangle_mm: See image
- Type: Float
- Range: 20 to 500 millimeters
- Default: 86.603
- kinematic_segment_len_mm:
- Details: To smooth out non linear machines the move is divided up into pieces. This indicates the maximum piece size. A big value will show the non linearity. A small vaue will be smoother, but increases processing time.
- Type: Float
- Range: 0.05 to 20 millimeters
- Default: 1.0
- up_degrees: This is the angle after homing. The kinematics expect homing to go in the negative (up) direction.
- Type: Float
- Range: -90 (straight up) to 0 (horizontal)
- Default: -30 degrees
¶ Axes Section
Example:
x:
steps_per_mm: 8.88
max_rate_mm_per_min: 5000
acceleration_mm_per_sec2: 100.000
max_travel_mm: 135.00
soft_limits: false
homing:
cycle: 1
positive_direction: false
mpos_mm: 0.0
feed_mm_per_min: 100.000
seek_mm_per_min: 200.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: 'gpio.36:low'
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 1.000000
- steps_per_mm:
- Details: This is step/degree (motor_step_per_rev * microstepping / 360)
- Type: Float
- Positive: values - max_rate_mm_per_min:
- Details: this rate is degrees/min
- Type: Float
- max_travel_mm:
- Details: This is the total travel in degrees.
- soft_limits:
- Details: Use false. This does not really apply. The kinematics will catch reject any unreachable moves.
- homing:
- cycle:
- Details: Typically this is 1 for all axes
- positive_direction:
- Detail: This should typically be negative for all axes
- mpos_mm:
- This sets the axis machine position after homing.
- cycle: