¶ Overview
This page is to share information helpful when using FluidNC on the ESP32_6_axis_breakout_board. Your first line of support should be directly with the supplier. They also have a wiki. We cannot guarantee this is accurate and mistakes could damage your controller.
¶ Problems
This board is Not Recommended and the FluidNC developers will not respond to questions or issues that arise from its use. It has numerous design and build problems as detailed below.
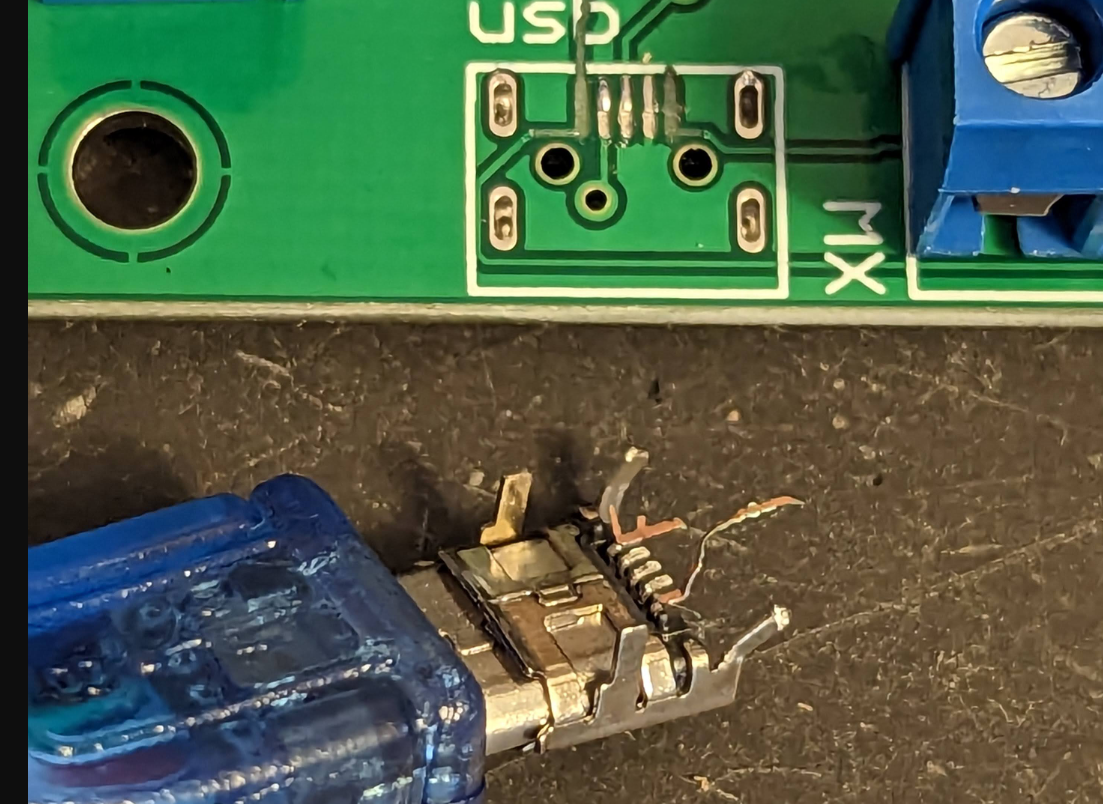
- There has been a report of poor build quality on an instance of this board, specifically cold solder joints - probably on the thru-hole components. Most seriously, the USB connector holddown tabs were not soldered, causing it to break away from the board. It would be a good idea to inspect and possibly resolder the board.
- It does not have an SD card slot so you cannot run jobs with WebUI. You could add one externally, but there are no connectors for the unused GPIO pins so you would have to solder tiny wires directly to the ESP32 pins.
- It does not respond to the DTR line for reset via USB.
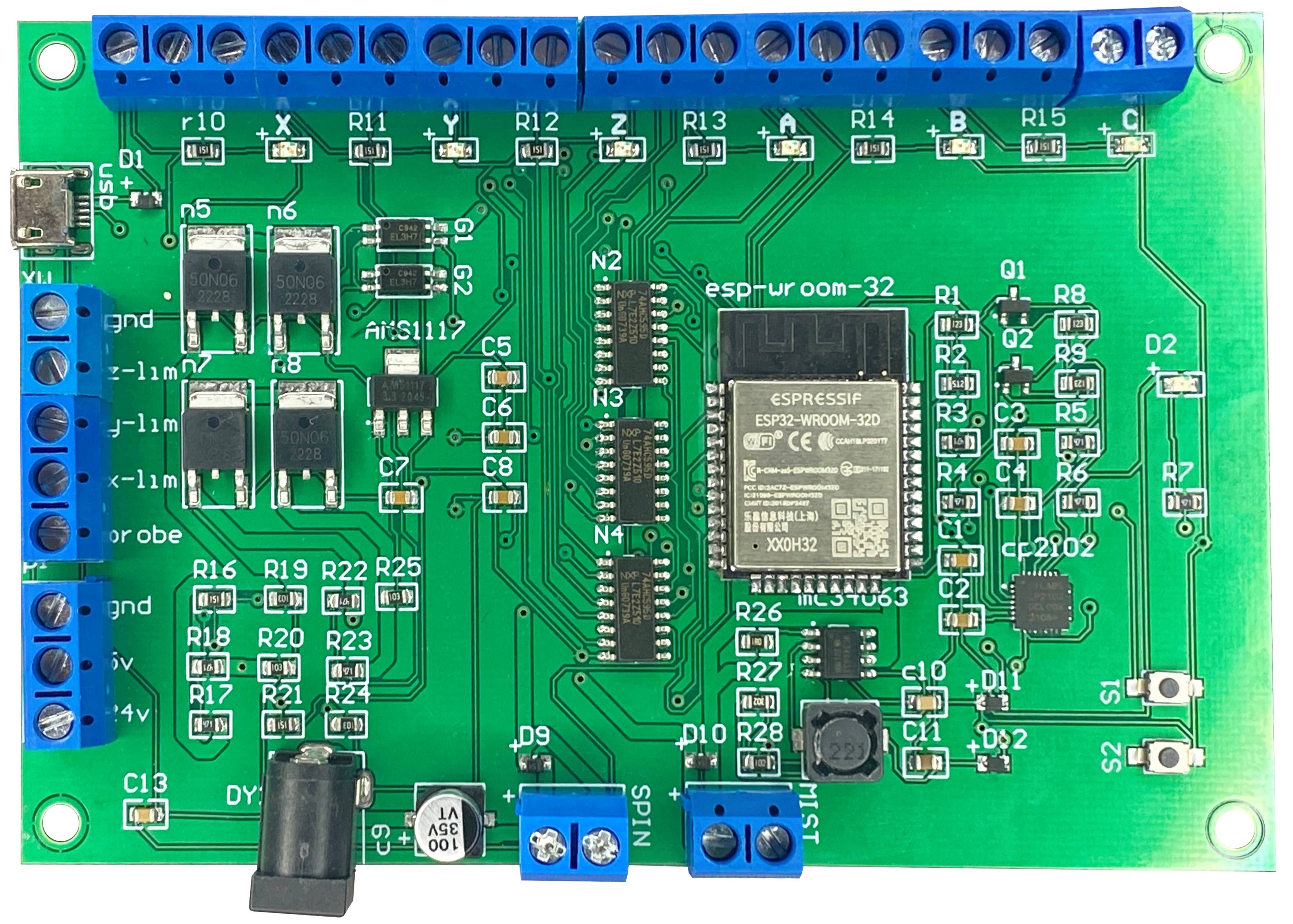
- The ESP32 module has a built-in (not external) antenna that is located in a poor position above a ground plane, so the WiFi range is likely to be very poor.
- There have been reports of power instability even when powered from the barrel jack.
¶ Stepper Driver Pinout
The controller uses is compatable with most external motor drivers and can be setup with simple drivers or drivers requiring a third pin. Each axis has 3 output pins dedicated for direction, Pulse and enable (Or switchout enable with you desired pin).
The labels for the motors are suggestions only. You can use any driver for any axis or motor(0/1) you want. Unfortunately there are a number of pins that are not used and can be soldered directly if your handy with minature wires.
The unused pins are:
- GPIO.0
- GPIO.5
- GPIO.12
- GPIO.13
- GPIO.14
- GPIO.25
- GPIO.26
See example below for a 6 axis setup. Axis a, b or c can be stup as a dual motor axis, however there are not enough limit outputs to home independantly. You could access an unused pin if needed.
¶ Example Config File
board: 6axis CNC controller
name: 6axis board - yaml by NewTechCreative
stepping:
engine: I2S_STREAM
idle_ms: 250
pulse_us: 4
dir_delay_us: 1
disable_delay_us: 0
axes:
shared_stepper_disable_pin: NO_PIN
x:
steps_per_mm: 800.000
max_rate_mm_per_min: 5000.000
acceleration_mm_per_sec2: 100.000
max_travel_mm: 300.000
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 150.000
feed_mm_per_min: 100.000
seek_mm_per_min: 200.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: NO_PIN
limit_all_pin: gpio.33
hard_limits: true
pulloff_mm: 1.000
stepstick:
ms3_pin: i2so.3
step_pin: I2SO.2
direction_pin: I2SO.1
disable_pin: I2SO.0
y:
steps_per_mm: 800.000
max_rate_mm_per_min: 5000.000
acceleration_mm_per_sec2: 100.000
max_travel_mm: 300.000
soft_limits: false
homing:
cycle: 2
positive_direction: true
mpos_mm: 150.000
feed_mm_per_min: 100.000
seek_mm_per_min: 200.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: NO_PIN
limit_all_pin: gpio.32
hard_limits: true
pulloff_mm: 1.000
stepstick:
ms3_pin: i2so.6
step_pin: I2SO.5
direction_pin: I2SO.4
disable_pin: I2SO.7
z:
steps_per_mm: 800.000
max_rate_mm_per_min: 5000.000
acceleration_mm_per_sec2: 100.000
max_travel_mm: 300.000
soft_limits: false
homing:
cycle: 1
positive_direction: true
mpos_mm: 150.000
feed_mm_per_min: 100.000
seek_mm_per_min: 800.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: NO_PIN
limit_all_pin: gpio.35
hard_limits: true
pulloff_mm: 1.000
stepstick:
ms3_pin: i2so.11
step_pin: I2SO.10
direction_pin: I2SO.9
disable_pin: I2SO.8
a:
steps_per_mm: 53.400
max_rate_mm_per_min: 5000.000
acceleration_mm_per_sec2: 100.000
max_travel_mm: 960.000
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 150.000
feed_mm_per_min: 100.000
seek_mm_per_min: 200.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 3.000
stepstick:
ms3_pin: i2so.14
step_pin: I2SO.13
direction_pin: I2SO.12
disable_pin: I2SO.15
b:
steps_per_mm: 808.000
max_rate_mm_per_min: 5000.000
acceleration_mm_per_sec2: 100.000
max_travel_mm: 200.000
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 150.000
feed_mm_per_min: 100.000
seek_mm_per_min: 800.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 3.000
tmc_2130:
cs_pin: i2so.19
step_pin: I2SO.18
direction_pin: I2SO.17
disable_pin: I2SO.16
c:
steps_per_mm: 808.000
max_rate_mm_per_min: 5000.000
acceleration_mm_per_sec2: 100.000
max_travel_mm: 200.000
soft_limits: false
homing:
cycle: 1
positive_direction: false
mpos_mm: 150.000
feed_mm_per_min: 100.000
seek_mm_per_min: 800.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 3.000
tmc_2130:
cs_pin: i2so.22
step_pin: I2SO.21
direction_pin: I2SO.20
disable_pin: I2SO.23
i2so:
bck_pin: gpio.22
data_pin: gpio.21
ws_pin: gpio.17
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
control:
safety_door_pin: NO_PIN
reset_pin: NO_PIN
feed_hold_pin: gpio.36
cycle_start_pin: NO_PIN
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
coolant:
flood_pin: NO_PIN
mist_pin: gpio.4
delay_ms: 0
probe:
pin: gpio.34
check_mode_start: true
macros:
startup_line0:
startup_line1:
macro0:
macro1:
macro2:
macro3:
start:
must_home: false
PWM:
pwm_hz: 5000
output_pin: gpio.27
enable_pin: NO_PIN
direction_pin: NO_PIN
disable_with_s0: false
s0_with_disable: true
spinup_ms: 1000
spindown_ms: 1000
tool_num: 0
speed_map: 0=0.000% 1000=100.000%