¶ Header

¶ Overview
This controller uses the ESP32 S3 chip. It must be compiled using the experimental S3 branch. Ask on Discord about this.
¶ USB
This uses a CH340 USB to serial chip. Make sure you have the driver for this. Most computers do not come with this driver.
This is not the CDC USB that is built into the ESP32-S3. That is not available on this controller.
¶ MKS Documentation
- Github Repo
- Operation Manual
- Schematic (can't find one)
¶ Uploading firmware
Currently you must compile yourself for the S3 chip and upload.
¶ Motors
Use The motors use a shared disable pin (gpio.8). Use motor type "stepstick:" or "standard_stepper:"
¶ SD Card
spi:
miso_pin: gpio.12
mosi_pin: gpio.14
sck_pin: gpio.13
sdcard:
cs_pin: gpio.21
card_detect_pin: gpio.10
frequency_hz: 8000000
¶ RJ11 Uart Connector
# Begin expansion port uart and channel setup
uart1:
txd_pin: gpio.17
rxd_pin: gpio.18
baud: 1000000
mode: 8N1
uart_channel1:
report_interval_ms: 75
uart_num: 1
# End expansion port set up.
¶ External power switch
There are 2 solder pads labeled "switch". This can be used for an external power switch. The fuse completes the circuit when a switch is not used, so you musat remove the fuse when using an external switch.
¶ Example Config
board: MKC DLC32 Max
name: MKC DLC32 Max Default
meta:
stepping:
engine: Timed
idle_ms: 255
pulse_us: 4
dir_delay_us: 0
disable_delay_us: 0
segments: 12
spi:
miso_pin: gpio.12
mosi_pin: gpio.14
sck_pin: gpio.13
sdcard:
cs_pin: gpio.21
card_detect_pin: gpio.10
frequency_hz: 8000000
# Begin expansion port uart and channel setup
uart1:
txd_pin: gpio.17
rxd_pin: gpio.18
baud: 1000000
mode: 8N1
uart_channel1:
report_interval_ms: 75
uart_num: 1
# End expansion port set up.
kinematics:
Cartesian:
axes:
shared_stepper_disable_pin: gpio.8
homing_runs: 2
x:
steps_per_mm: 80.000000
max_rate_mm_per_min: 1000.000000
acceleration_mm_per_sec2: 25.000000
max_travel_mm: 1000.000000
soft_limits: false
motor0:
limit_neg_pin: gpio.39:low
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 1.000000
stepstick:
step_pin: gpio.16
direction_pin: gpio.15
y:
steps_per_mm: 80.000000
max_rate_mm_per_min: 1000.000000
acceleration_mm_per_sec2: 25.000000
max_travel_mm: 1000.000000
soft_limits: false
motor0:
limit_neg_pin: gpio.40:low
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 1.000000
stepstick:
step_pin: gpio.7
direction_pin: gpio.6
z:
steps_per_mm: 80.000000
max_rate_mm_per_min: 1000.000000
acceleration_mm_per_sec2: 25.000000
max_travel_mm: 1000.000000
soft_limits: false
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.41:low
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 1.000000
stepstick:
step_pin: gpio.5
direction_pin: gpio.4
a:
steps_per_mm: 80.000000
max_rate_mm_per_min: 1000.000000
acceleration_mm_per_sec2: 25.000000
max_travel_mm: 1000.000000
soft_limits: false
motor0:
limit_neg_pin: gpio.48:low
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 1.000000
stepstick:
step_pin: gpio.20
direction_pin: gpio.19
control:
safety_door_pin: gpio.38:low
reset_pin: NO_PIN
feed_hold_pin: NO_PIN
cycle_start_pin: NO_PIN
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
fault_pin: NO_PIN
estop_pin: NO_PIN
homing_button_pin: NO_PIN
coolant:
# Labeled Air
flood_pin: gpio.1
# Beeper
mist_pin: gpio.42
delay_ms: 0
probe:
pin: gpio.37
toolsetter_pin: NO_PIN
check_mode_start: true
hard_stop: false
macros:
startup_line0:
startup_line1:
Macro0:
Macro1:
Macro2:
Macro3:
after_homing:
after_reset:
after_unlock:
Laser:
pwm_hz: 5000
output_pin: gpio.2
enable_pin: NO_PIN
disable_with_s0: false
s0_with_disable: true
tool_num: 0
speed_map: 0=0.000% 255=100.000%
off_on_alarm: true
pwm:
pwm_hz: 5000
direction_pin: NO_PIN
output_pin: gpio.35
enable_pin: NO_PIN
disable_with_s0: false
s0_with_disable: true
spinup_ms: 0
spindown_ms: 0
tool_num: 1
speed_map: 0=0.000% 10000=100.000%
off_on_alarm: false
start:
must_home: false
deactivate_parking: false
check_limits: true
arc_tolerance_mm: 0.002000
junction_deviation_mm: 0.010000
verbose_errors: true
report_inches: false
enable_parking_override_control: false
use_line_numbers: false
planner_blocks: 16
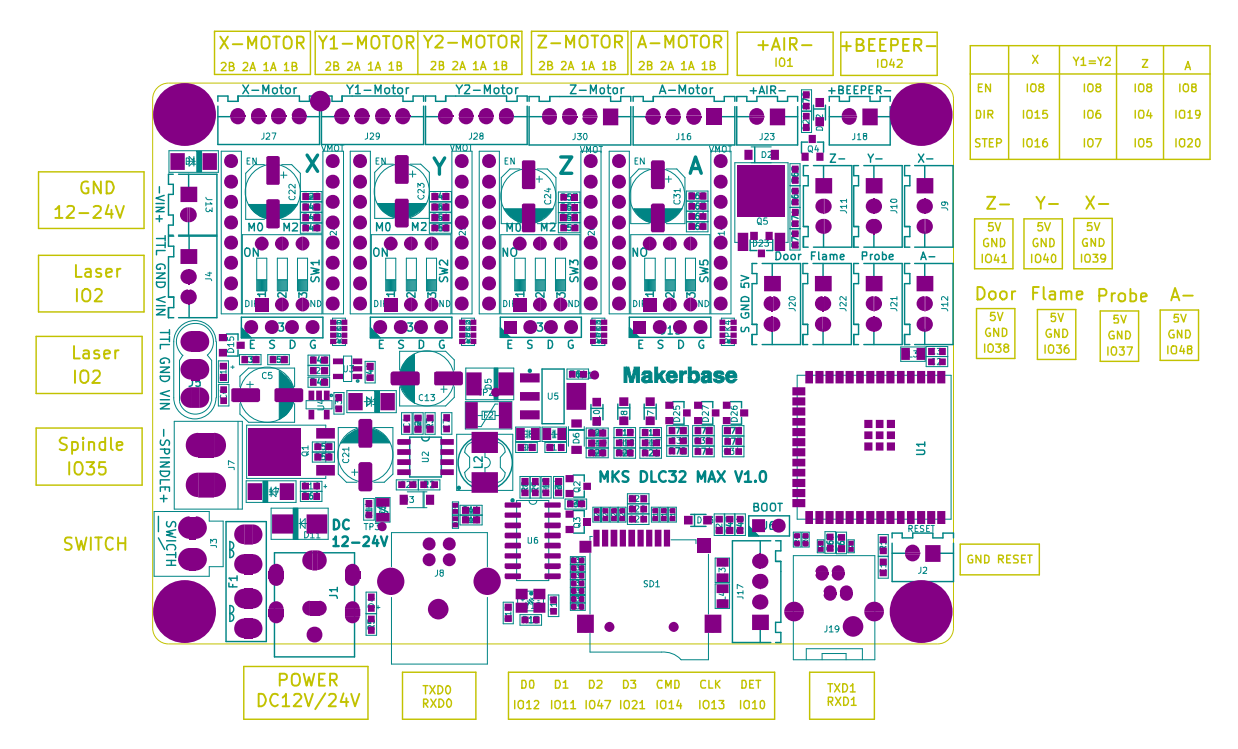
¶ Pinout