¶ MKS Tinybee
Note: The display that sometimes ships with this controller is not supported by FluidNC and probably never will be.
¶ Reference Links
- Github
- Latest Schematic
- Manual
- User-contributed IO Spreadsheet - Discord announcement
- User-contributed IO Spreadsheet
¶ Images
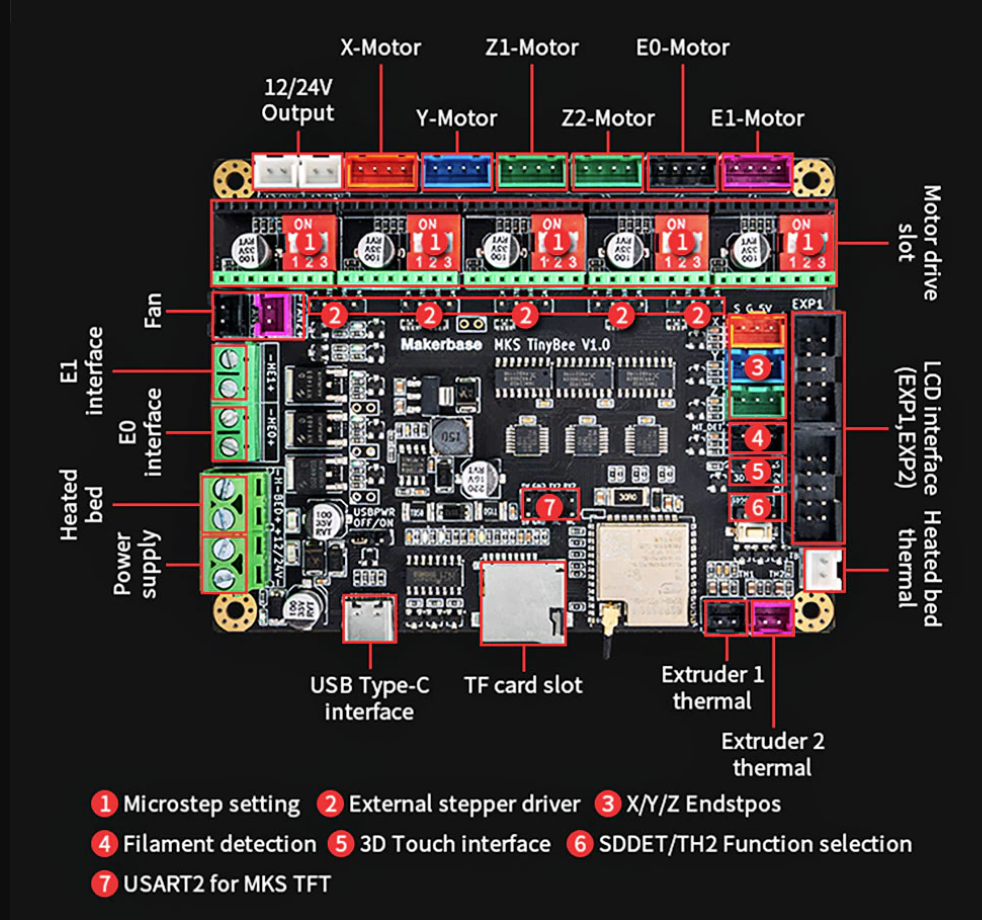
¶ Pinout
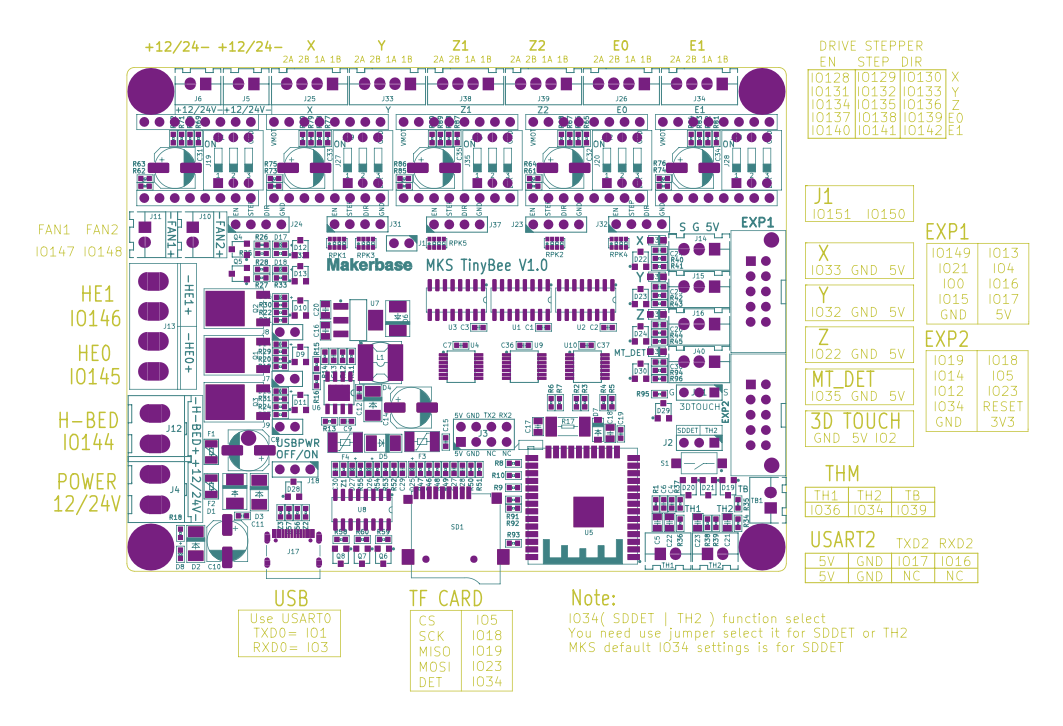
¶ IO Identification
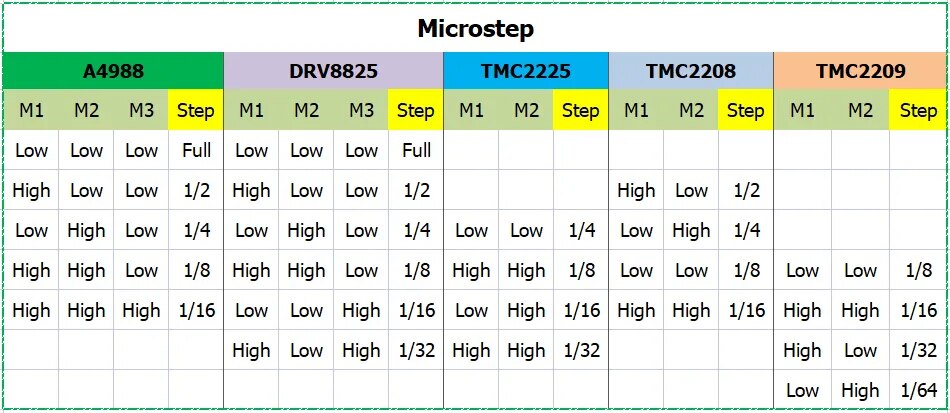
¶ Microstepping
¶ Pins
| Pin | Usage | Notes |
|---|---|---|
| gpio.0 | LCD_D4 | |
| gpio.1 | TXD0 | Used for USB/Serial |
| gpio.2 | 3D_TOUCH | Can only be used as an output due to other circuitry |
| gpio.3 | RXD0 | Used for USB/Serial |
| gpio.4 | LCD_RS | |
| gpio.5 | SPI_CS | SD Card |
| gpio.12 | LCD_MISO/BTN_ENC2 | |
| gpio.13 | LCD_MOSI/BTN_ENC | |
| gpio.14 | LCD_CLK | |
| gpio.15 | LCD_D6 | |
| gpio.16 | LCD_D5 | On USART2, not EXP1 |
| gpio.17 | LCD_D7 | ON USART2, not EXP1 |
| gpio.18 | SPI_CLK | SD Card |
| gpio.19 | SPI_MISO | SD Card |
| gpio.21 | LCD_EN | |
| gpio.22 | Limit Z- | Should be used as an input |
| gpio.23 | SPI_MOSI | SD Card |
| gpio.25 | I2S_BCK | I2S bck_pin: gpio.25 |
| gpio.26 | I2S_WS | I2S ws_pin: gpio.26 |
| gpio.27 | I2S_DATA | I2S data_pin: gpio.27 |
| gpio.32 | Limit Y- | Should be used as an input |
| gpio.33 | Limit X- | Should be used as an input |
| gpio.35 | MT_DET | |
| gpio.34 | SPI_DET or TH2 (Jumper 2) | |
| gpio.36 | (sensor VP) TH1 | Pin 2 |
| gpio.39 | (Sensor VN) TB | Pin 2 |
| i2so.0 | X_EN | |
| i2so.1 | X_STEP | |
| i2so.2 | X_DIR | |
| i2so.3 | Y_EN | |
| i2so.4 | Y_STEP | |
| i2so.5 | Y_DIR | |
| i2so.6 | Z_EN | |
| i2so.7 | Z_STEP | |
| i2so.8 | Z_DIR | |
| i2so.9 | E0_EN | |
| i2so.10 | E0_STEP | |
| i2so.11 | E0_DIR | |
| i2so.12 | E1_EN | |
| i2so.13 | E1_STEP | |
| i2so.14 | E1_DIR | |
| i2so.15 | (N/C) | |
| i2so.16 | H-BED | Driver mosfet G024N03 - 30V/100A. Cannot be used for PWM. |
| i2so.17 | H-E0 | Driver mosfet HY1403D - 30V/42A. Cannot be used for PWM. |
| *i2so.18 | H-E1 | Driver mosfet HY1403D - 30V/42A. Cannot be used for PWM. |
| i2so.19 | H-FAN1 | |
| i2so.20 | FAN2 | |
| i2so.21 | BEEPER | |
| i2so.22 | OUT_Q150 | |
| i2so.23 | OUT_Q151 | |
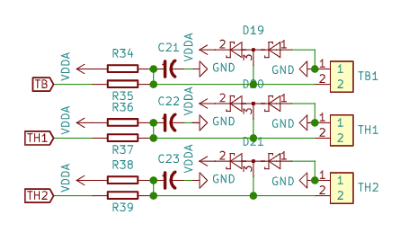
¶ Inputs
The temperature sensor connectors can be used as active low inputs.
- TH2 gpio.34:low
- TH1 gpio.36:low
- TB gpio.39:low
The X,Y and Z limit switch connectors can be used as inputs. They have pullups and should be switched to ground (active low)
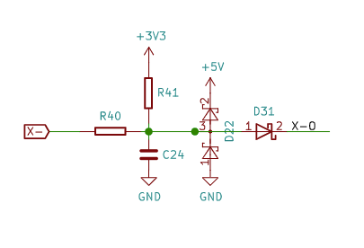
- limit_neg_pin: gpio.22:low
- limit_neg_pin: gpio.32:low
- limit_neg_pin: gpio.33:low
¶ Example Config
board: MKS TinyBee V1.0 XXYYZ
name:
kinematics:
Cartesian:
i2so:
bck_pin: gpio.25
data_pin: gpio.27
ws_pin: gpio.26
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
# uses TH2 IO34 active low - MAKE SURE jumper J2 is set to SDDET!!!
card_detect_pin: gpio.34:low
stepping:
engine: I2S_STATIC
idle_ms: 255
pulse_us: 4
dir_delay_us: 1
disable_delay_us: 2
axes:
x:
steps_per_mm: 40
max_rate_mm_per_min: 8000.000
acceleration_mm_per_sec2: 80.000
max_travel_mm: 2500.000
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 0.000
feed_mm_per_min: 300.000
seek_mm_per_min: 1500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: gpio.33:low:pu
hard_limits: true
pulloff_mm: 4.000
stepstick:
step_pin: I2SO.1
direction_pin: I2SO.2
disable_pin: I2SO.0
# use E0 driver for 2nd X axis motor
motor1:
hard_limits: true
pulloff_mm: 4.000
stepstick:
step_pin: I2SO.10
direction_pin: I2SO.11
disable_pin: I2SO.9
y:
steps_per_mm: 40
max_rate_mm_per_min: 8000.000
acceleration_mm_per_sec2: 70.000
max_travel_mm: 1250.000
soft_limits: false
homing:
cycle: 3
positive_direction: false
mpos_mm: 0.000
feed_mm_per_min: 300.000
seek_mm_per_min: 2000.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: gpio.32:low:pu
hard_limits: false
pulloff_mm: 4.000
stepstick:
step_pin: I2SO.4
direction_pin: I2SO.5
disable_pin: I2SO.3
# use E1 driver for 2nd Y axis motor
motor1:
limit_neg_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
stepstick:
step_pin: I2SO.13
direction_pin: I2SO.14
disable_pin: I2SO.12
z:
steps_per_mm: 200.000
max_rate_mm_per_min: 8000.000
acceleration_mm_per_sec2: 60.000
max_travel_mm: 80.000
soft_limits: false
homing:
cycle: 1
positive_direction: true
mpos_mm: 0.000
feed_mm_per_min: 300.000
seek_mm_per_min: 500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_pos_pin: gpio.22:low:pu
hard_limits: true
pulloff_mm: 3.000
stepstick:
step_pin: I2SO.7
direction_pin: I2SO.8
disable_pin: I2SO.6
control:
safety_door_pin: NO_PIN
# on MT_DET connector
reset_pin: gpio.35:low
# on TH1 connector
feed_hold_pin: gpio.36:low
# on TB connector
cycle_start_pin: gpio.39:low
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
coolant:
# Heated Bed Terminal Block
flood_pin: i2so.16
# HE0 Terminal Block
mist_pin: i2so.17
delay_ms: 0
# spindle PWM signal
PWM:
pwm_hz: 2500
# on EXP1 IO15 connector.
# note IO15 will give some short pulses on boot, which may activate spindle
# use IO17 on EXP1 to avoid
output_pin: gpio.15:high
s0_with_disable: true
tool_num: 0
spinup_ms: 4000
spindown_ms: 4000
speed_map: 0=0.000% 12000=100.000%
Laser:
pwm_hz: 5000
# on 3D Touch connector (has pdwn + PWM)
output_pin: gpio.2:high:pd
s0_with_disable: true
tool_num: 1
speed_map: 0=0.000% 1000=100.000%
start:
must_home: false
¶ Probe Example
gpio.35 is the MT_DET port. Make sure it is not assigned to another function in your config.
probe:
pin: gpio.35:pu:low
check_mode_start: true
¶ RS485 Spindle Control
Coming soon...see this Discord discussion MKS_TinyBee.
Or see this discussion.
uart2:
txd_pin: gpio.4
rxd_pin: gpio.13
rts_pin: NO_PIN
baud: 9600
mode: 8N1
H100:
uart_num: 2
modbus_id: 1
tool_num: 0
speed_map: 0=0% 0=25% 6000=25% 24000=100%
off_on_alarm: false
¶ Modifications to allow UART control of drivers
WARNING: depending on the drivers you are using, you can destroy your board if you don not set the third DIP switch on every driver to OFF
To allow UART control you need to link all of the driver RST pins together on the back of the board. The pin directly to the left of the RST pin (labelled "P") is also connected to the RST pin, which can make point-to-point wiring easier.
Connect one RST or P pin to the RX2 pin, and another RST or P pin to TX2 with a resistor. The RX2 and TX2 pins are the top two left-most pins when viewed from the back. Usually this resistor is a 1K, however I had to use 330R. You may need to try a higher or lower value resistor to get yours to work.
Set all your DIP switches to OFF. Then assign addresses using the 1 & 2 dip switches.
0 = OFF OFF
1 = ON- OFF
2 = OFF ON
3 = ON- ON
There are 5 drivers on the board, however drivers can share the same address.
uart2:
txd_pin: gpio.17
rxd_pin: gpio.16
baud: 115200
mode: 8N1
Set each motor to use UART in the usual way, something like this: (you will need to change the addr along with the step, direction and disable pins for each motor)
tmc_2209:
uart_num: 2
addr: 0
r_sense_ohms: 0.110
run_amps: 1.200
hold_amps: 0.800
microsteps: 4
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: true
step_pin: I2SO.1
direction_pin: I2SO.2
disable_pin: I2SO.0