¶ Fysetc E4
¶ Documentation
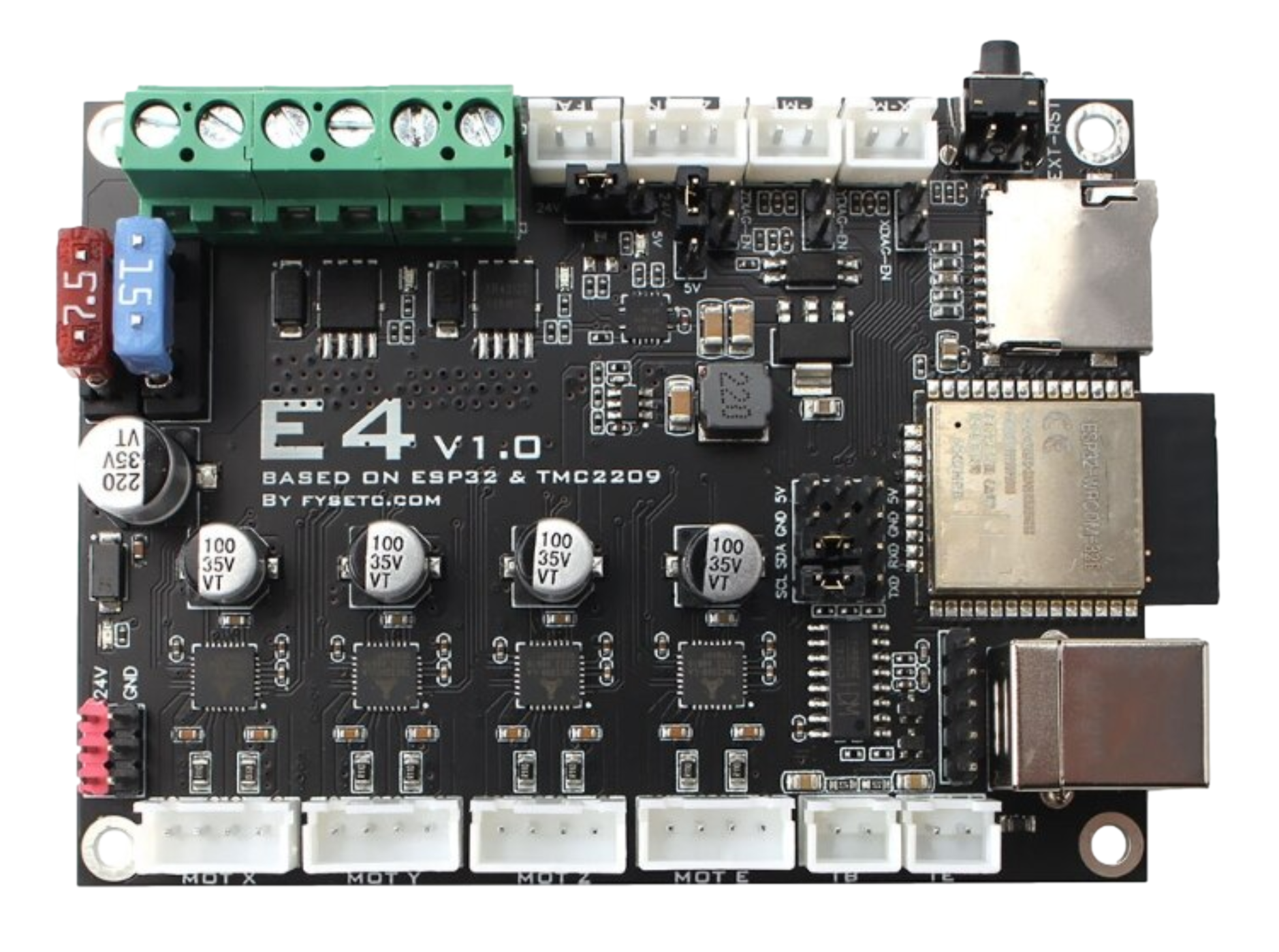
¶ Motor Drivers
They are TMC2209 chips
The chip addresses are in a confusing order. See below
- MOT X is addr: 1
- MOT Y is addr: 3
- MOT Z is addr: 0
- MOT E is addr: 2
¶ Example Config
name: "EleksLaser with Fysetc E4 controller"
board: "Fysetc E4"
stepping:
engine: RMT
idle_ms: 250
dir_delay_us: 1
pulse_us: 2
disable_delay_us: 0
kinematics:
cartesian:
uart1:
txd_pin: gpio.22
rxd_pin: gpio.21
rts_pin: NO_PIN
cts_pin: NO_PIN
baud: 115200
mode: 8N1
axes:
shared_stepper_disable_pin: gpio.25:high
x:
steps_per_mm: 80
max_rate_mm_per_min: 16000.000
acceleration_mm_per_sec2: 500.000
max_travel_mm: 370.000
soft_limits: true
homing:
cycle: 1
positive_direction: false
mpos_mm: 0.000
feed_mm_per_min: 200.000
seek_mm_per_min: 2000.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: gpio.15
hard_limits: false
pulloff_mm: 3.000
tmc_2209:
uart_num: 1
addr: 1
r_sense_ohms: 0.110
run_amps: 1.0
hold_amps: 0.500
microsteps: 16
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: gpio.27
direction_pin: gpio.26:low
disable_pin: NO_PIN
y:
steps_per_mm: 80
max_rate_mm_per_min: 12000.000
acceleration_mm_per_sec2: 500.000
max_travel_mm: 295.000
soft_limits: true
homing:
cycle: 1
positive_direction: false
mpos_mm: 0.000
feed_mm_per_min: 200.000
seek_mm_per_min: 2000.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: gpio.35
hard_limits: false
pulloff_mm: 3.000
tmc_2209:
# Labeled Y
uart_num: 1
addr: 3
r_sense_ohms: 0.110
run_amps: 1.0
hold_amps: 0.500
microsteps: 16
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: gpio.33
direction_pin: gpio.32
disable_pin: NO_PIN
motor1:
limit_neg_pin: gpio.34
hard_limits: false
pulloff_mm: 3.000
tmc_2209:
uart_num: 1
# Labeled Z
addr: 0
r_sense_ohms: 0.110
run_amps: 1.000
hold_amps: 0.500
microsteps: 16
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: gpio.14
direction_pin: gpio.12:low
disable_pin: NO_PIN
z:
motor0:
tmc_2209:
uart_num: 1
# Labeled E
addr: 2
r_sense_ohms: 0.110
run_amps: 1.0
hold_amps: 0.500
microsteps: 16
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: CoolStep
homing_mode: CoolStep
use_enable: false
step_pin: gpio.16
direction_pin: gpio.17
disable_pin: NO_PIN
laser:
output_pin: gpio.2
speed_map: 0=0% 1000=100%
coolant:
mist_pin: gpio.13
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
card_detect_pin: NO_PIN
start:
must_home: true
deactivate_parking: false
check_limits: false
probe:
pin: NO_PIN
check_mode_start: true