¶ Overview
- (4) TMC2209 Stepper Drivers in UART Mode
- Can use stallguard for sensorless end stops
- (6) inputs
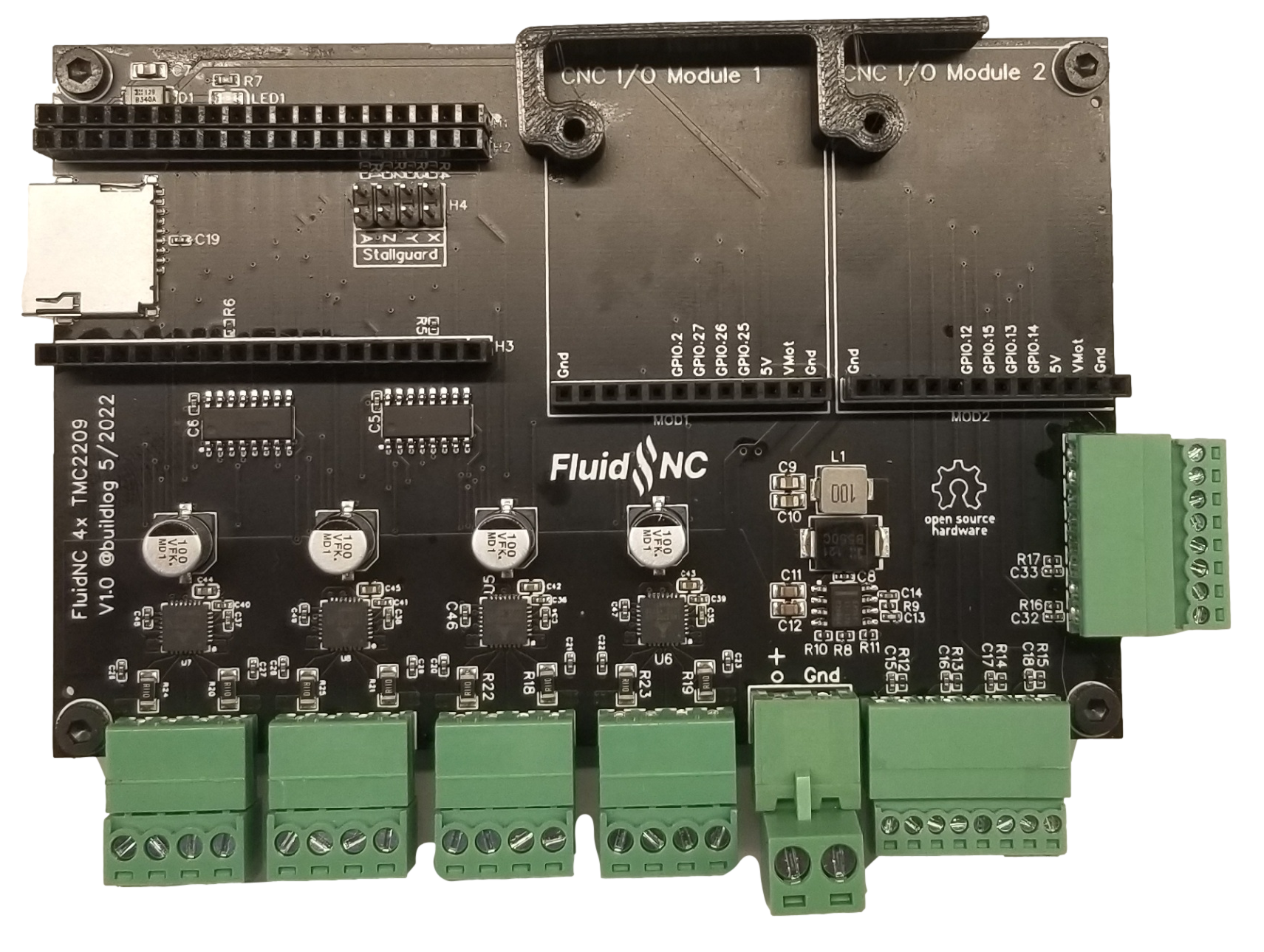
- (2) CNC I/O Module Sockets
- SD Card socket.
- 9-30V operating voltage.
¶ Motor Power
The motor power must be on before the USB is attached in order for the motor drivers to accept the configuration.
If you accidentally plug in the USB first, just click the reset button on the ESP32 module or send the $Motors/Init or $MI command.
¶ Motor Wiring
Connect the motor coils to adjacent terminals.
¶ Axis labels
The drivers and limit switch inputs are label XYZ and A. This is just for reference. You can use the motors for any axis arrangement like XYYZ, etc. The switch inputs can also be used for any axis or switch input.
¶ Inputs
All inputs need :pu. There are no external pulling resistors.
¶ Using StallGuard
There are (4) jumpers under the ESP32 labeled XYZA. When a jumper is installed, they connect the driver chip StallGuard signal to GPIO inputs on the ESP32.
- X gpio.36
- Y gpio.39
- Z gpio.34
- A gpio.35
If you install a jumper, you cannot use the corrosponding input on the terminal block.
¶ Source Files
¶ Config Information
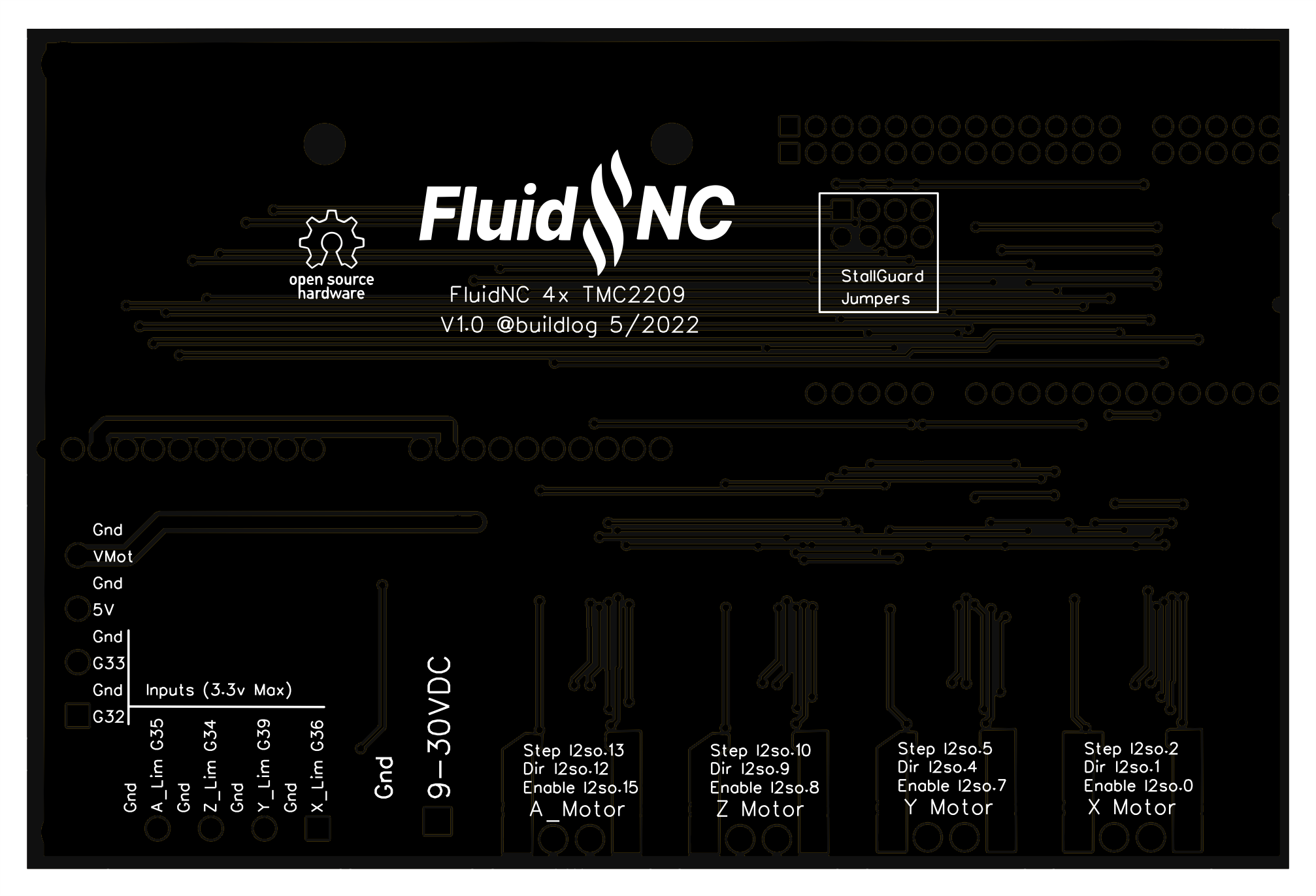
The labels near the terminal blocks show the I/O used to control the built in drivers. They are not labeling the terminal block pins. Those are to be connected directly to stepper motor coils.
Example Config
name: "TMC2209 XYZA Huany"
board: "FluidNC 4X 2209"
stepping:
engine: I2S_STREAM
idle_ms: 250
dir_delay_us: 1
pulse_us: 4
disable_delay_us: 0
axes:
shared_stepper_disable_pin: NO_PIN
x:
steps_per_mm: 400.000
max_rate_mm_per_min: 5000.000
acceleration_mm_per_sec2: 150.000
max_travel_mm: 750
homing:
cycle: 1
mpos_mm: 0
positive_direction: false
seek_mm_per_min: 3000
feed_mm_per_min: 240
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
tmc_2209:
uart:
txd_pin: gpio.16
rxd_pin: gpio.4
rts_pin: NO_PIN
cts_pin: NO_PIN
baud: 115200
mode: 8N1
addr: 0
r_sense_ohms: 0.110
run_amps: 1.000
hold_amps: 0.500
microsteps: 32
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: CoolStep
homing_mode: CoolStep
use_enable: false
direction_pin: i2so.1
step_pin: i2so.2
disable_pin: i2so.0
y:
steps_per_mm: 53.33
max_rate_mm_per_min: 18000
acceleration_mm_per_sec2: 950
max_travel_mm: 410
homing:
cycle: 1
mpos_mm: 0
positive_direction: false
seek_mm_per_min: 3000
feed_mm_per_min: 240
motor0:
limit_neg_pin: gpio.39:low
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
tmc_2209:
addr: 1
r_sense_ohms: 0.110
run_amps: 1.000
hold_amps: 0.500
microsteps: 16
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
direction_pin: i2so.4
step_pin: i2so.5
disable_pin: i2so.7
z:
steps_per_mm: 400
max_rate_mm_per_min: 200
acceleration_mm_per_sec2: 25
max_travel_mm: 200
homing:
cycle: 2
mpos_mm: 0
positive_direction: false
seek_mm_per_min: 200
feed_mm_per_min: 100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.34:low
limit_all_pin: NO_PIN
tmc_2209:
addr: 2
r_sense_ohms: 0.110
run_amps: 1.000
hold_amps: 0.500
microsteps: 16
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
direction_pin: i2so.9
step_pin: i2so.10
disable_pin: i2so.8
a:
steps_per_mm: 400
max_rate_mm_per_min: 200
acceleration_mm_per_sec2: 25
max_travel_mm: 200
homing:
cycle: 2
mpos_mm: 0
positive_direction: false
seek_mm_per_min: 200
feed_mm_per_min: 100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.35:low
limit_all_pin: NO_PIN
tmc_2209:
addr: 3
r_sense_ohms: 0.110
run_amps: 1.000
hold_amps: 0.500
microsteps: 16
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
direction_pin: i2so.12
step_pin: i2so.13
disable_pin: i2so.15
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
i2so:
bck_pin: gpio.22
data_pin: gpio.21
ws_pin: gpio.17
sdcard:
cs_pin: gpio.5
card_detect_pin: NO_PIN
10V:
forward_pin: gpio.25
reverse_pin: gpio.26
pwm_hz: 5000
output_pin: gpio.27
enable_pin: NO_PIN
direction_pin: NO_PIN
disable_with_s0: false
s0_with_disable: true
spinup_ms: 0
spindown_ms: 0
tool_num: 0
speed_map: 0=0.000% 1000=0.000% 24000=100.000%
off_on_alarm: false
RS485 Example (just a portion of the config)
# Socket 1
Huanyang:
uart:
txd_pin: gpio.25
rxd_pin: gpio.27
rts_pin: gpio.26
baud: 9600
mode: 8N1
modbus_id: 1
tool_num: 0
speed_map: 0=0% 0=25% 6000=25% 24000=100%